
Proizvodi



Pneumatski manipulator za rukovanje staklom s vakuumskom čašom
Kratak opis:
Pneumatski manipulator, također poznat kao manipulator, dizalica za balans, pojačivač ravnoteže, mašina za ručni prijenos opterećenja (gornja izjava nije profesionalna, ali je popularna u Kini), novi je, koji se koristi za rukovanje materijalom i instalaciju i rad energetske opreme za uštedu rada.

Pneumatski manipulator za rukovanje staklom s vakuumskom čašom primjenjuje princip ravnoteže sile, tako da operater može gurnuti i povući teški predmet u skladu s tim, što može uravnotežiti kretanje u prostoru. radna sila je zagarantovana gasnim putem (proces obrade i kontrola troškova dizajna, radna sila je manja od 3 kg kao standard procene) na radnu silu utiče težina radnog komada. Bez veštog rada, operater može gurnuti i povući teški predmet rukom i pravilno staviti težinu u bilo koju poziciju u prostoru.

o nama

Mi smo profesionalni proizvođač opreme za automatizaciju po mjeri. Naši proizvodi uključuju depaletizator, mašinu za paletiranje, paletizator, aplikaciju za integraciju robota, manipulatore za utovar i istovar, formiranje kartona, zaptivanje kartona, dozator paleta, mašinu za umatanje i druga rješenja za automatizaciju za pozadinske proizvodne linije pakovanja.
Površina naše fabrike je oko 3.500 kvadratnih metara. Osnovni tehnički tim ima u prosjeku 5-10 godina iskustva u mehaničkoj automatizaciji, uključujući 2 inženjera mašinskog dizajna. 1 inženjer programiranja, 8 radnika montaže, 4 osobe za otklanjanje grešaka nakon prodaje i ostalih 10 radnika
Naš princip je „kupac na prvom mestu, kvalitet na prvom mestu, reputacija na prvom mestu“, uvek pomažemo našim klijentima da „povećaju proizvodni kapacitet, smanje troškove i poboljšaju kvalitet“ nastojimo da postanemo vrhunski dobavljač u industriji automatizacije mašina.
- 1. Struktura: Kompletni pneumatski manipulator snage uglavnom se sastoji od hosta za skladištenje instalacije i uređaja.2. Instalacijski temelj se dijeli na: 1. Stub fiksni 2. Osnovni pokretni 3. Plafonski ovjes fiksni 4 Plafonski ovjes je mobilan
3. Učvršćenje: Općenito prilagođeno prema veličini izgleda komada koji je dao kupac.1. tip kuke; 2. tip hvata; 3. vrsta zatezanja; 4. tip unutrašnjeg uspona; 5. tip lifta; 6. tip drške; 7. transformacija okretanja gripa (okretanje 90° ili 180°) 0; 8. vakuum adsorpcija; 9. vakuum adsorpciona transformacija okretanja (okretanje 90° ili 180°) i druge, posebno odabrane i razvijene i dizajnirane, postigla je dobar učinak upotrebe.
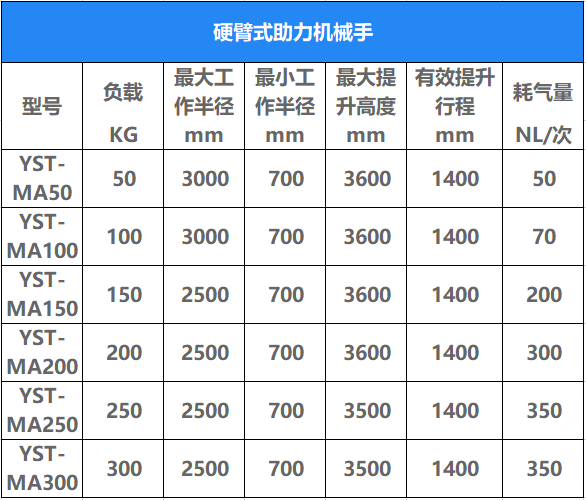
4. Host: uglavnom se sastoji od balansiranog cilindra i krute konzole za višestruko isključivanje, a glavni parametri su kapacitet dizanja i radni radijus.
Opis proizvoda
rukovanje staklom za usisnu čašu Pneumatski manipulatori su dizajnirani za rad sa prekomjerno visećim teretima. Iz tog razloga su apsolutno neophodni za utovar i istovar industrijskih mašina. Zahvaljujući pneumatskim dodacima i specijalnim dodacima, moguće je ne samo podizati dijelove, već i rotirati, naginjati mrav da ih okrene naopako ili, jednostavnije, nagnuti.
Karakteristike proizvoda
1. Kompletni pneumatski manipulator snage uglavnom se sastoji od hosta za skladištenje instalacije i uređaja.
2. Instalacijski temelj se dijeli na: 1. Stub fiksni 2. Osnovni pokretni 3. Plafonski ovjes fiksni 4 Plafonski ovjes je mobilan
3. Učvršćenje: Općenito prilagođeno prema veličini izgleda komada koji je dao kupac.1. tip kuke; 2. tip hvata; 3. vrsta zatezanja; 4. tip unutrašnjeg uspona; 5. tip lifta; 6. tip drške; 7. transformacija okretanja gripa (okretanje 90° ili 180°) 0; 8. vakuum adsorpcija; 9. vakuum adsorpciona transformacija okretanja (okretanje 90° ili 180°) i druge, posebno odabrane i razvijene i dizajnirane, postigla je dobar učinak upotrebe.
4. Host: uglavnom se sastoji od balansiranog cilindra i krute konzole za višestruko isključivanje, a glavni parametri su kapacitet dizanja i radni radijus.







